



자율주행로봇AGILEX RANGER MINI 3.0

WeGo 자율주행 플랫폼 UGV
(Unmanned Ground Vehicle)
최근 자율 주행로봇은 무인 방역시스템, 순찰 기능을 탑재한 자율 주행 보안 시스템, 과학 및 연구 목적형 로봇, 탐사로봇, 물류이송 및 기타 분야에 광범위하게 적용되고 있습니다.
또한 위고에서는 최근 납품 이후에도 발생할 수 있는 문제를 위하여 기술 지원도 팀을 별도로 운영하여 문제가 없이 사후 관리를 효율적으로 운영을 하고 있습니다.
기업체에서 바로 적용이 가능한 로봇의 컨설팅과 시스템 엔지니어링도 제공하고 있으니 언제든지 저희 엔지니어들과 상담하여 주십시오.
전방향성모바일로봇

AGILEX RANGER MINI 3.0은 프로그램 가능한 전 방향 UGV 무인 접지 차량으로 설계되었으며, 이는 애커먼 스티어링에 적용된 섀시입니다.
4륜 차동 섀시와 비교할 때 RANGER MINI 3.0은 일반 시멘트 도로와 아스팔트 도로에서 달릴 때 분명한 이점이 있습니다. 속도와 하중 용량이 더 높을 뿐만 아니라 구조물과 타이어의 마모를 줄여주고 더 안정적이고 안전합니다. Ackermann 섀시와 비교할 때 RANGER MINI 3.0은 회전 반경을 줄일 뿐만 아니라 제로 회전을 할 수 있습니다. 다양하고 복잡한 지형에 적합한 차동 섀시와 Ackermann 섀시의 장점을 가지고 있습니다.
RANGER MINI 3.0은 모듈식 지능형 설계 개념을 기반으로 하여 파워 모듈에 솔리드 타이어와 스윙 암의 복합 설계를 채택하고 강력한 허브 모터를 탑재하여 RANGER MINI 3.0의 신속한 통과 능력과 지면 적응성을 높였습니다. 전기 인터페이스는 항공 방수 커넥터를 채택하여 확장 및 사용에 도움이 되며 열약한 환경에서도 사용할 수 있습니다.
Ranger mini 3.0 특장점
-

4WD 전 방향 로봇의 모션 제어
RANGER MINI 3.0은 기존 RANGER MINI의 업그레이드 버전입니다. 산업용 애플리케이션의 맥락에서 작동하는 모바일 로봇을 위한 혁신적인 디자인을 제공합니다. 유연한 조향, 강력한 기동성, 0 회전 반경을 가지고 있으며 4 * 100W 고조파 드라이브 및 4 * 350W 구동 모터 제어 시스템을 사용하여 현장에서 360º 조향을 달성할 수 있습니다.
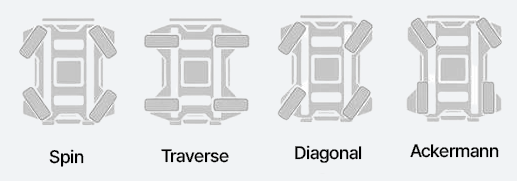
- 네 가지 스티어링 모드 : (a) 회전 (b) 트래버스 (C) 크랩 스티어링 (d) Ackermann 스티어링
- IP54의 방수 및 방전
-

독립 서스펜션은 더 많은 유연성을 제공
RANGER MINIi 3.0은 80kg의 적재 능력을 가진 4륜 독립 서스펜션 시스템을 채택하고, 로봇의 기동성, 통행성 및 안전성을 효과적으로 향상시킬 수 있습니다. 15º 이상의 경사와 80mm 오버 리지로 다양한 산업 현장의 어려운 필드에 적응할 수 있는 능력을 가지고 있습니다.
- 107mm의 지상고와 강력한 장애물 통과 능력
- 최대 하중 상승 15º 및 내하중 80kg
- 다양한 도로 상황에 대응하는 독립적인 4륜 서스펜션
-

모듈 개발, 고속 충전 및 배터리 교체
RANGER MINI 3.0은 작은 크기, 높은 호환성, 긴 배터리 수명, 유지 관리가 간편합니다. 다양한 소프트웨어 및 하드웨어 인터페이스가 장착되어 있으며 광범위한 상위 구성 요소 응용 프로그램을 지원합니다. 또한 고속 충전 및 핫 스와핑 기능을 지원하여 로봇에 항상 전원이 공급되도록 합니다.
- 배터리 수명은 완전히 로드되었을 때 최대 7 시간 동안 지속
- 1시간 충전으로 30km를 주행
- 핫스왑 배터리 교체
기술적인 사양
| 구분 | 규격 |
|---|---|
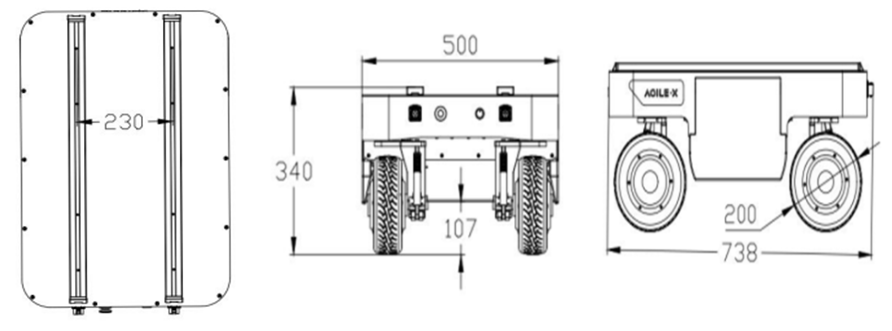
| Dimensions | 738 x 500 x 338 mm |
| Kerb weight | 64. 5 kg |
| Payload | 80 kg |
| Axle Track | 494 mm |
| Front/rear track | 364 mm |
| Battery type | Lithium iron phosphate |
| Battery parameters | 48V24AH |
| Power drive motor | 350w x 4 |
| Steering drive motor | 100w x 4 |
| Parking type | Electronic brake |
| Steering type | 4 wheels steering |
| Suspension | Independent suspension |
| Steering motor reduction ratio | 1:50 |
| Steering motor encoder | Multiturn absolute encoder (9bit) |
| 구분 | 규격 |
|---|---|
| Drive motor reduction ratio | 1:4.428 |
| Drive motor sensor | Hall |
| Charging Time | 2H |
| IP grade | IP54 |
| Maximum speed | 5.4 km/h |
| Minimum turning radius | 0mm (Spin mode) 810mm (Ackermann model) |
| Maximum gradeability | 15° with load |
| Ground clearance | 107 mm |
| Maximum travel | 35 km |
| Charging time | 1.5 h |
| Working temperature | -10~40 °C |
| Control mode | Remote control mode Command control mode |
| Remote controller | 2.4G/limit distance 200M |
| Communication Interface | CAN |